Docker Swarm Visualizer – Interface Web
[callout type= »tip » title= »Quick Win »]
Déploie une interface web en une commande pour visualiser en temps réel l’état de ton cluster Docker Swarm.
[/callout]
Contexte
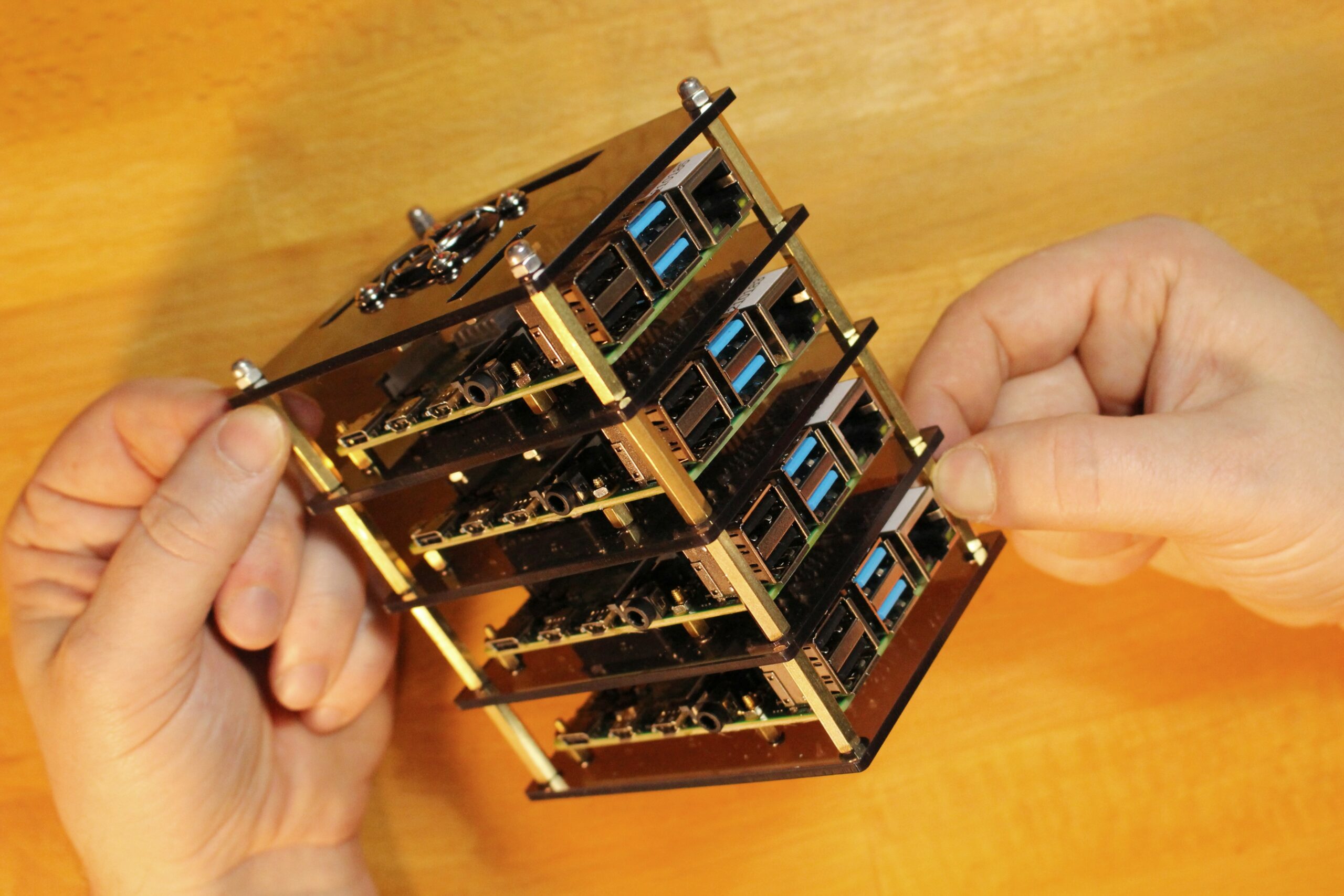
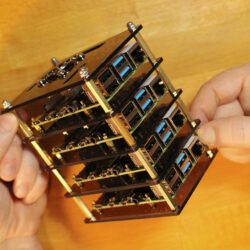
Quand tu gères un cluster Docker Swarm multi-nœuds, il est essentiel d’avoir une vue d’ensemble de l’état des services et des conteneurs. Le Swarm Visualizer d’Alex Ellis fournit exactement ça.
Installation
[code lang= »bash » title= »deploy-visualizer.sh »]
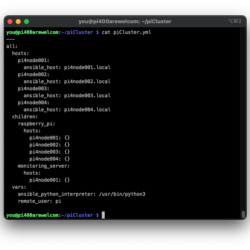
Vérifier l’état du cluster
pi@pi4node001:~ $ docker node ls
ID HOSTNAME STATUS AVAILABILITY MANAGER STATUS ENGINE VERSION
ppyfmhdq6p4xpflqj17eay2cm * pi4node001 Ready Active Leader 20.10.5
pwsktgnu30hvtx5zkgsz4ay2v pi4node002 Ready Active 20.10.5
zmt3lly41a9ultipey0p42oor pi4node003 Ready Active 20.10.5
ushbeebwkt20orsg29uhy8420 pi4node004 Ready Active 20.10.5
Déployer le visualizer
docker service create
–name viz
–publish 8080:8080/tcp
–constraint node.role==manager
–mount type=bind,src=/var/run/docker.sock,dst=/var/run/docker.sock
alexellis2/visualizer-arm:latest
Vérifier le déploiement
docker service ls
ID NAME MODE REPLICAS IMAGE PORTS
ki6uzmz4myuu viz replicated 1/1 alexellis2/visualizer-arm:latest *:8080->8080/tcp
[/code]
[callout type= »note » title= »Architecture ARM »]
Utilise alexellis2/visualizer-arm:latest pour Raspberry Pi. Pour x86, utilise dockersamples/visualizer.
[/callout]
Accès
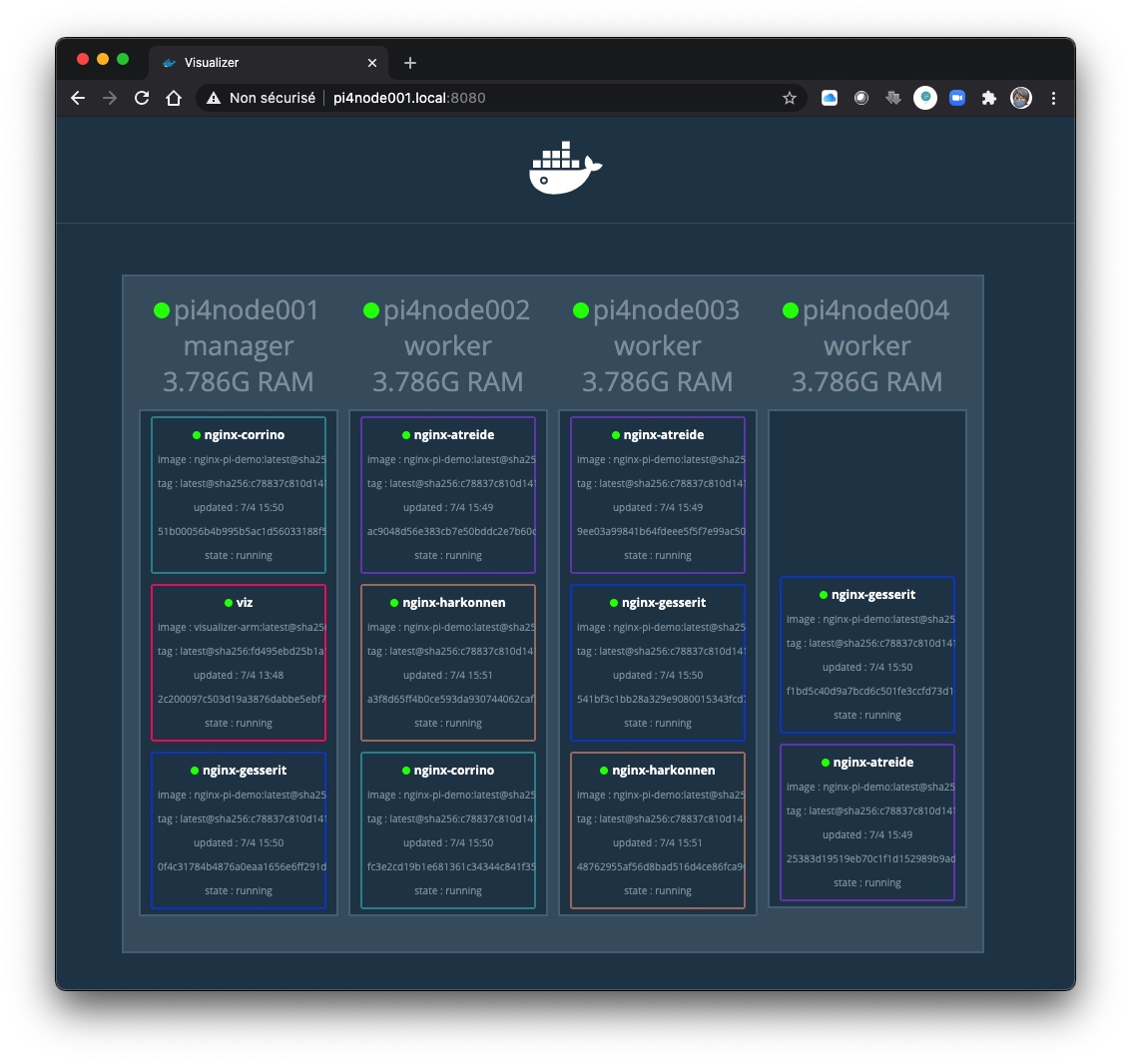
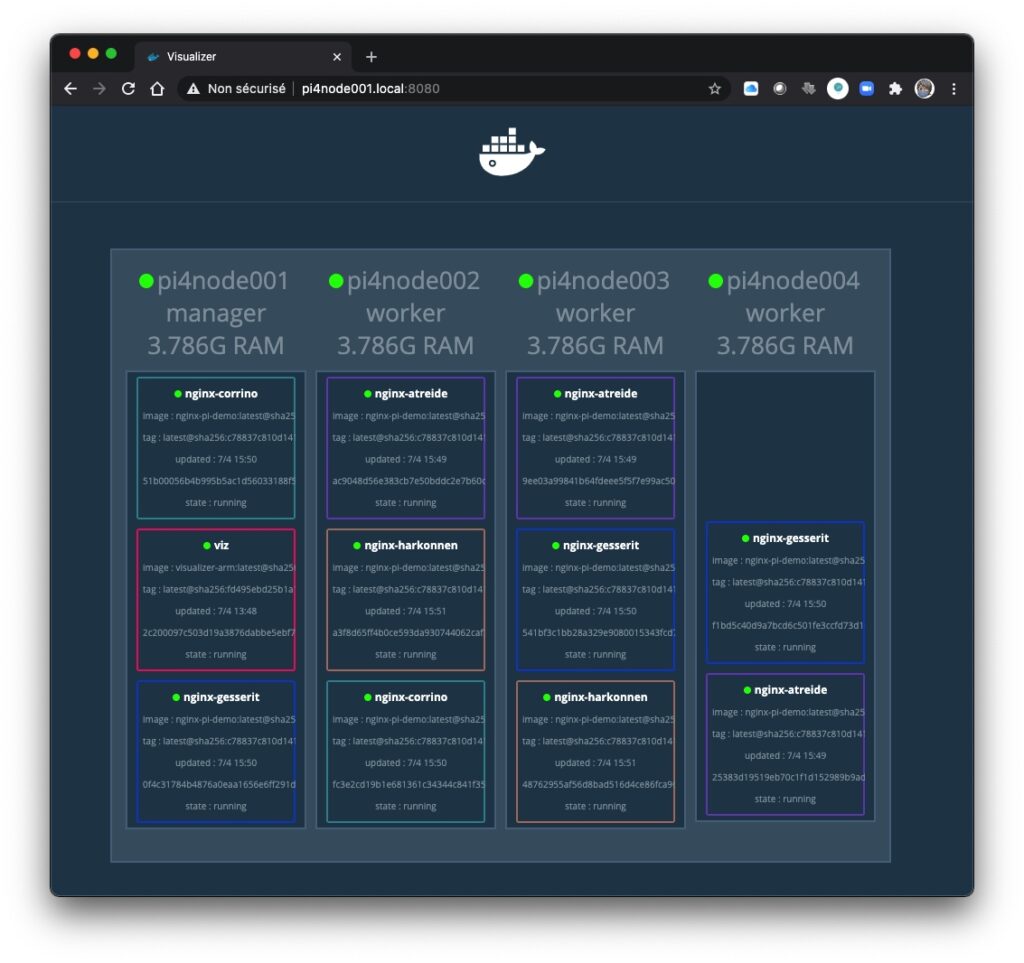
Une fois déployé, accède à l’interface via: http://IP_MANAGER:8080
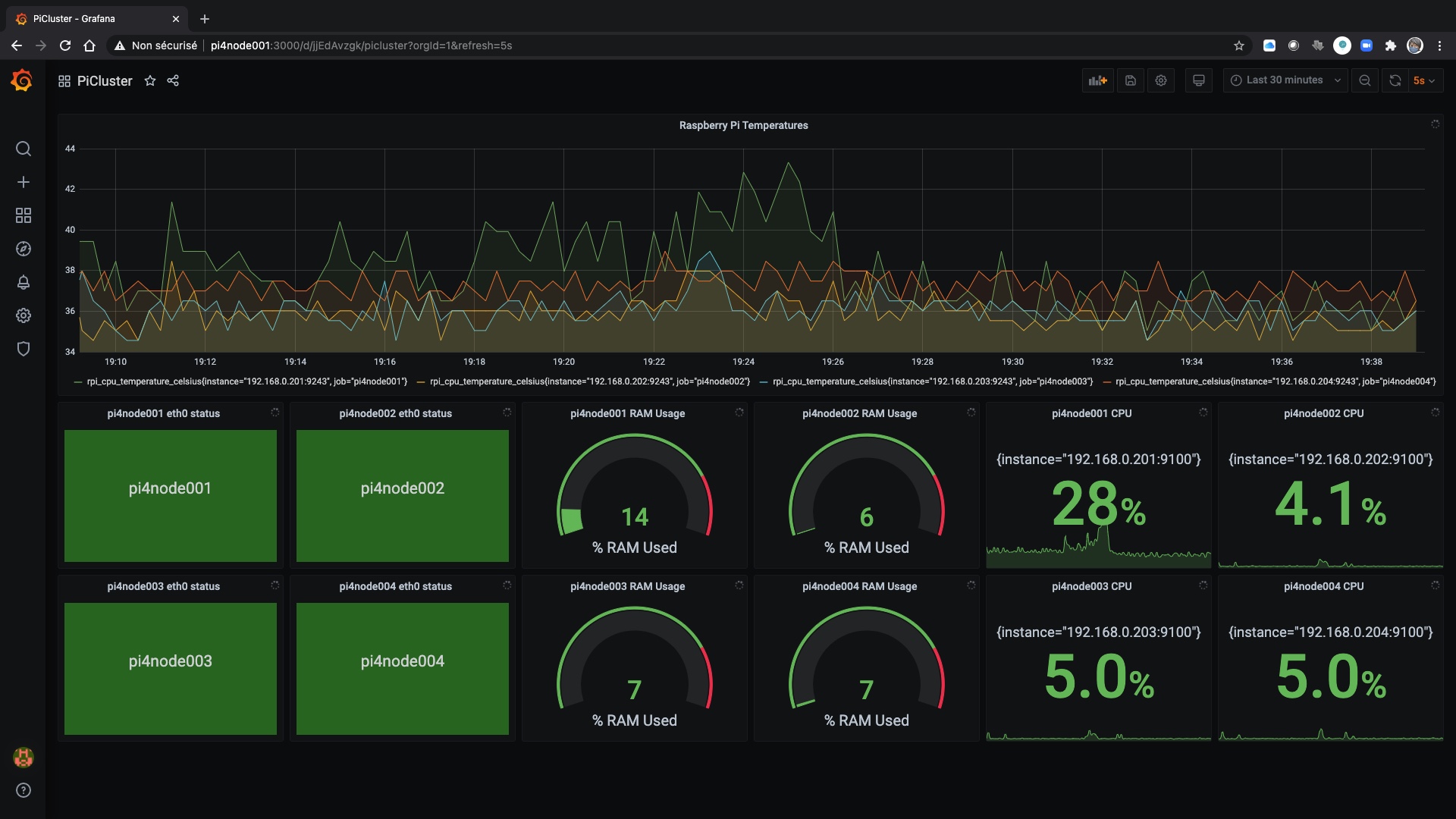
L’interface affiche en temps réel:
- 📊 Tous les nœuds du cluster
- 🐳 Les conteneurs sur chaque nœud
- 📈 L’état des services
- 🔄 Les mises à jour en live
Performance
[metrics before= »K3s: ~800MB RAM » after= »Swarm: ~200MB RAM » improvement= »+75% plus léger »]
[callout type= »success »]
Docker Swarm est significativement moins gourmand en ressources que K3s, ce qui est idéal pour des clusters Raspberry Pi.
[/callout]
Configuration Avancée
Persistence des Données
Pour sauvegarder l’état du visualizer:
[code lang= »bash » title= »visualizer-with-volume.sh »]
docker service create
–name viz
–publish 8080:8080/tcp
–constraint node.role==manager
–mount type=bind,src=/var/run/docker.sock,dst=/var/run/docker.sock
–mount type=volume,src=viz-data,dst=/data
alexellis2/visualizer-arm:latest
[/code]
Mise à Jour
[code lang= »bash » title= »update-visualizer.sh »]
Mettre à jour l’image
docker service update
–image alexellis2/visualizer-arm:latest
viz
Vérifier le rollout
docker service ps viz
[/code]
Troubleshooting
[callout type= »warning » title= »Service ne démarre pas »]
Symptôme: Le service ne démarre pas ou redémarre en boucle.
Solutions:
- Vérifier que Docker socket est accessible:
ls -la /var/run/docker.sock - Vérifier les logs:
docker service logs viz - S’assurer que le port 8080 est libre:
netstat -tulpn | grep 8080
[/callout]🔗 Ressources
[resources]
[resource type= »github » url= »https://github.com/alexellis/docker-swarm-visualiser »]Swarm Visualizer – GitHub[/resource]
[resource type= »doc » url= »https://docs.docker.com/engine/swarm/ »]Docker Swarm Documentation[/resource]
[resource type= »blog » url= »https://blog.alexellis.io/docker-swarm-visualizer/ »]Blog Post – Alex Ellis[/resource]
[/resources]
Métadonnées WordPress
Difficulté: ⭐ (Débutant) Niveau: Beginner Temps d’implémentation: 5 min Production Ready: ✅ Catégories: Docker, Swarm, SRE, Observability URL originale: https://you.arewel.com/visualisation-du-swarm/